rolandash Just pay attention as no flow control line on Telem2 so mind your data rate setting not to exceed the processing speed of CPU on both side
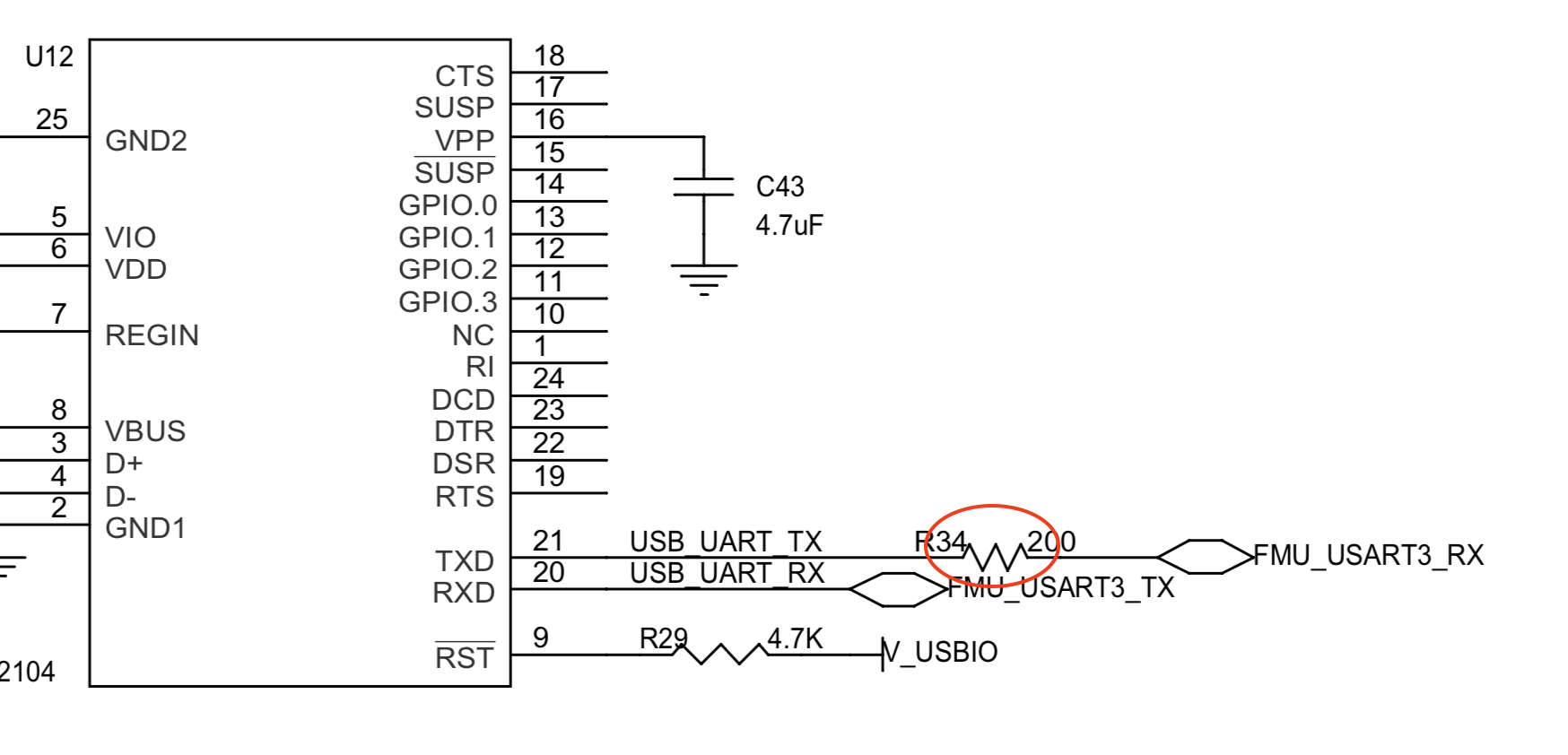
Hi Roland, recently when I fly the drone with offboard mode, the drone loses offboard command very often. The error in mavros is : "Failsafe enabled: No offboard". The ros rate I set is 100 and the topic (mavros/setpoint_raw/attitude) buffer size is 5, 1 or 10 (I changed to different sizes to see it it can solve it). And i am using Telem2 by removing R34. Is what you said the reason why the failsafe always be enabled?
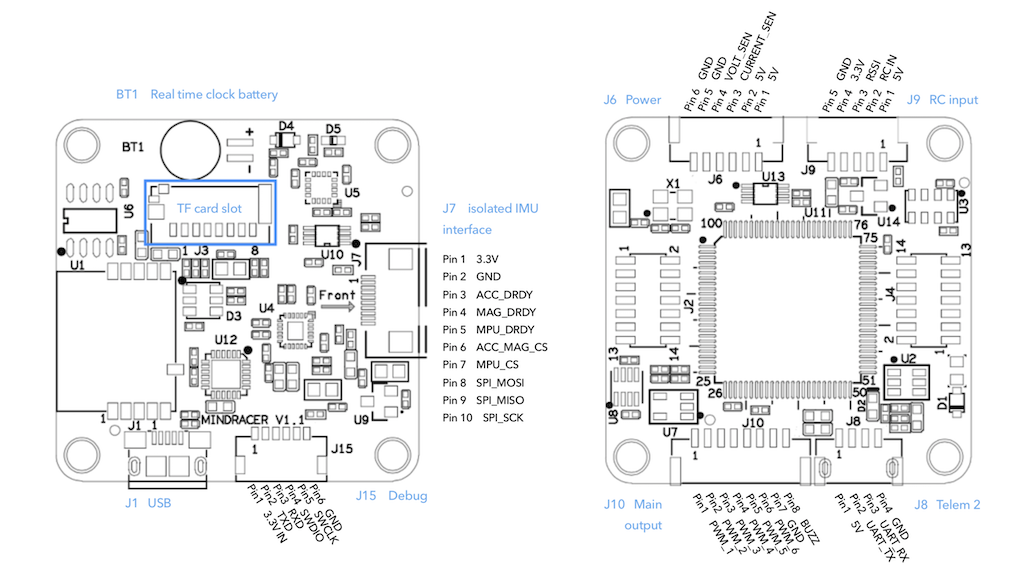
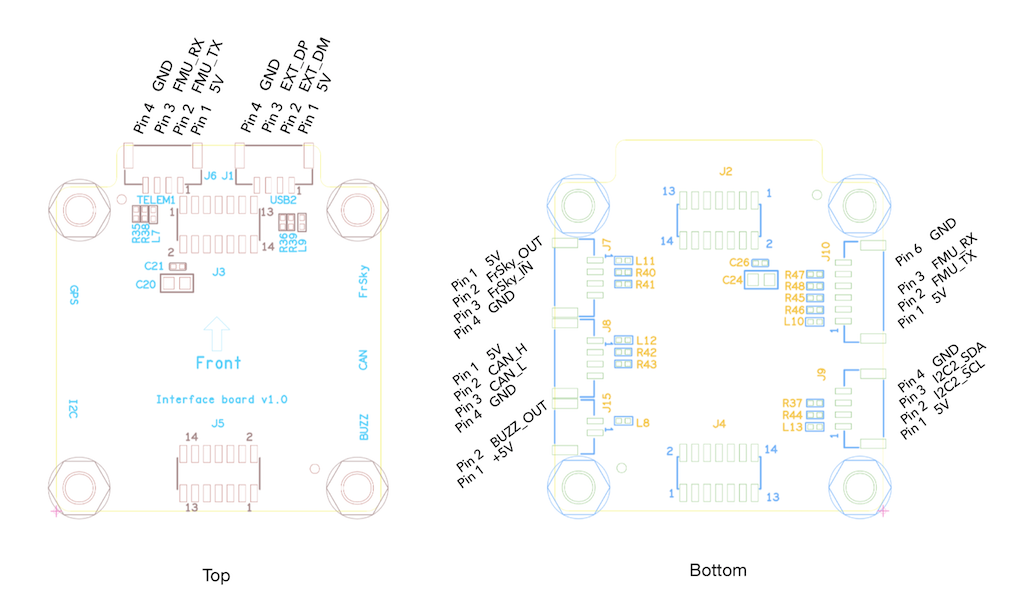
And I also tried to use Telem1, however, when I change mav_1_config to telem1, reconnect the USB to mindracer. I cannot see mav_1_mode, mav_1_forward, mav_1_rate (can be seen if change mav_1_config to telem2). And when i use the motion tracking system, the topic mavros/local_position/pose is published very slowly with wrong numbers (The output from motion tracking system is relayed to mavros/vision_pose/pose, it is correct).