LukasLi
Welcome!
To better understand how remote controller controls MindPX flight modes, and how to make a safe and high quality flight, there are some basic concepts need to be understood first.
Manual mode and throttle control
Below picture shows the behavior of throttle stick under Manual mode.
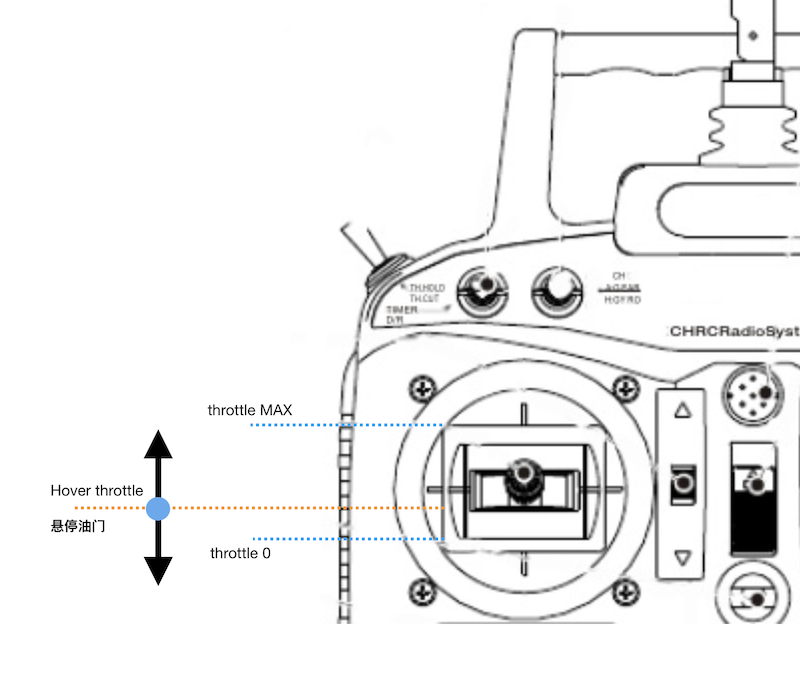
In this mode, throttle stick starts from lowest position and vary between position of 'throttle 0' and 'throttle MAX'. The higher throttle stick goes, the faster the drone will ascend. Lower throttle stick the drone will descend.
In between the range there will be a position that the drone will reach hovering status, i.e., 'hovering throttle'. Note this hovering throttle position may change depends on the payload of the drone.
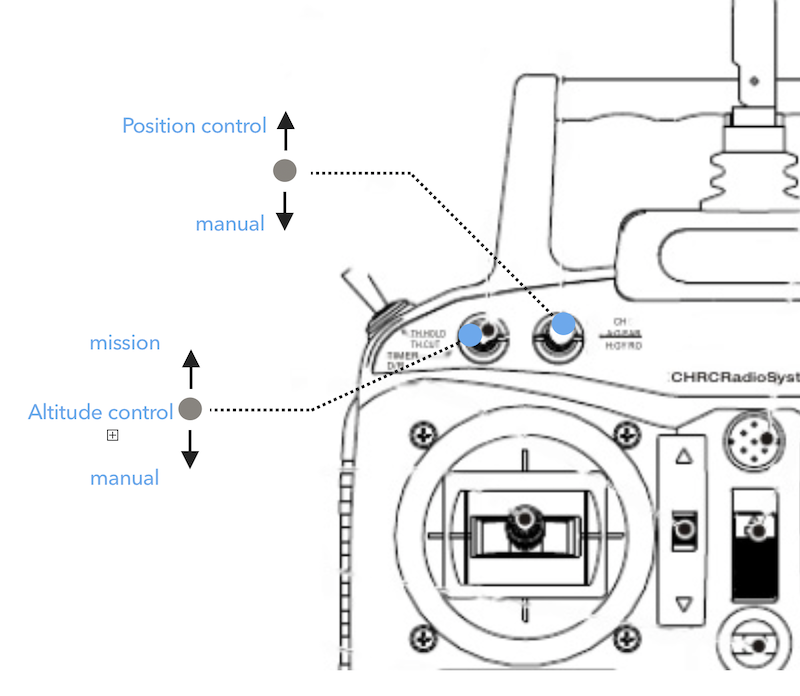
Position-control mode and throttle stick control
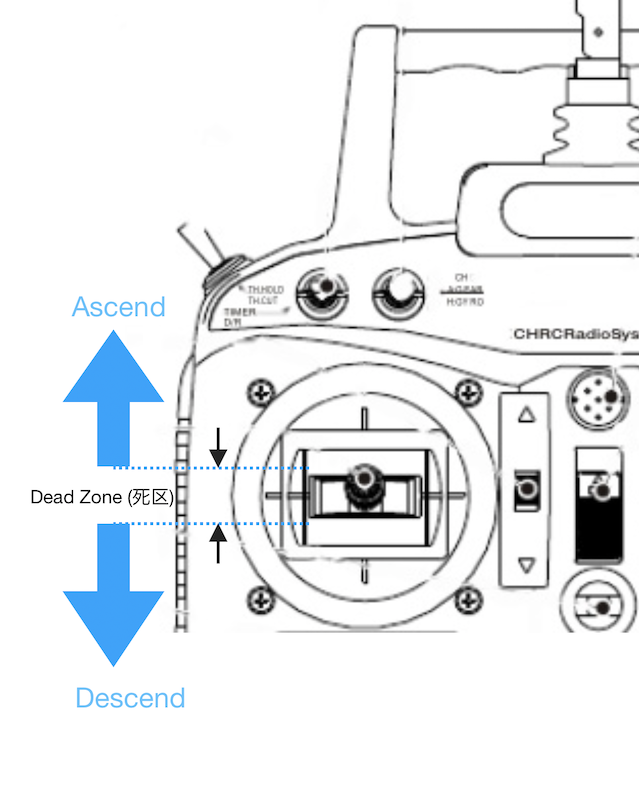
Under position control mode, the throttle stick is always centered when hovering. There is a 'dead zone' around the central position, where inside this zone the drone stays still at its current position/altitude (looks as if no response to stick movement). To lift drone's altitude, move the stick up outside the dead zone, and to lower drone's altitude, move the stick down outside the dead zone.
The more the stick is away from dead zone, the faster drone will ascend/descend.
The throttle stick behavior under Altitude control mode is the same as position control mode.